Processing math: 100%
6 Examples of different reductions
6.1 Deep point source maps
Many deep SCUBA-2 observations are designed to detect unresolved point sources. In this example
we work through the reduction of a cosmology survey, in which targets are high-redshift star-forming
galaxies (although the procedure is applicable to any observation of faint, unresolved objects). Since
the surface density of these distant sources falls rapidly with increasing brightness, most objects are,
on average, only slightly brighter than the extra-galactic confusion limit – the flux density below
which the surface density of sources is so great that there are many blended objects within a telescope
beam. Consequently, the sources of interest are usually only a few standard deviations
brighter than the noise in the map (caused by a combination of instrumental and source
confusion). In light of this, the recommended strategy for reducing such maps involves two basic
steps:
-
(1)
- Create a map using
dimmconfig_blank_field.lis (see Section 4.1) which, compared to
the default configuration, sacrifices structure on large scales to gain the best possible
noise performance on small scales (i.e. making the map as flat as possible). This is a good
compromise, since the sources should generally be the size of a telescope beam.
-
(2)
- Run the map through a combined ‘matched filter’ (which effectively fits a point spread
function, or PSF, centered over every pixel in the map) and a background suppression
filter (removing additional residual large-scale noise). This is a fairly standard technique
used throughout the extra-galactic sub-millimetre community to identify potential
sources.
For this example we will reduce a 13 minute,
450 μm,
6×6 arcmin
CURVY_PONG map towards the galaxy cluster MS0451 (see Section 1 for instructions on obtaining
the data for this tutorial and the usage policy). Although not deep enough to detect any individual
sources, this example is useful for illustrating features that are common to most of the extra-galactic
SRO data from the Spring of 2010.
First, assuming the data are in the current directory, we produce a map using the specialized
dimmconfig_blank_field:
% makemap s4a20100313_00029_00\*.sdf map450 method=iterate \
config=^$STARLINK_DIR/share/smurf/dimmconfig_blank_field.lis
For comparison, we also make a map using the default configuration:
% makemap s4a20100313_00029_00\*.sdf map450_default method=iterate \
config=^$STARLINK_DIR/share/smurf/dimmconfig.lis
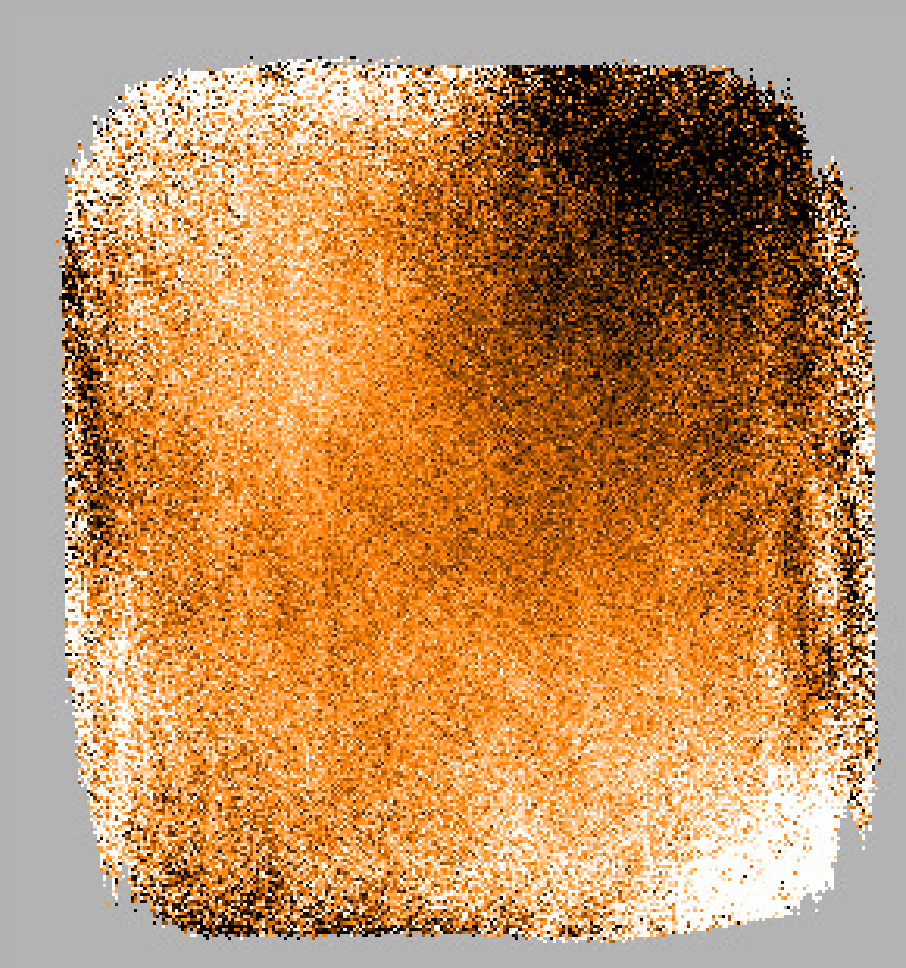
Both of the maps are shown in Fig. 11. Clearly the specialized configuration yields a flatter
map, although the white noise level is still quite large (no obvious sources are visible),
and there is some residual structure in the map caused by low-frequency noise that is not
effectively modeled/removed by the map-maker (vertical stripes that are aligned with the map
edges).
In order to optimally find sources that are the size of the telescope beam, and suppress this residual
large-scale noise, we provide a Picard recipe (see Section 5.2) called
SCUBA2_MATCHED_FILTER.
If there were no large-scale noise in the map, the filtered signal map would be calculated as follows:
|
ℳ=[M(x,y)/σ2(x,y)]⊗P(x,y)[1/σ2(x,y)]⊗[P2(x,y)],
| (9) |
where M(x,y)
and σ(x,y)
are the signal and RMS noise maps produced by Smurf, and
P(x,y) is a map of the
PSF. Here ‘⊗’
denotes the 2-dimensional cross-correlation operator. Similarly, the variance map would be calculated
as
|
𝒩2=1[1/σ2(x,y)]⊗[P2(x,y)].
| (10) |
This operation is equivalent to calculating the maximum-likelihood fit of the
PSF centered over every pixel in the map, taking into account the noise. Presently
P
is simply modeled as an ideal Gaussian with a FWHM set to the diffraction limit of the
telescope.
However, since there is large-scale (and therefore correlated from pixel to pixel) noise, the recipe also
has an additional step. It first smooths the map by cross-correlating with a larger Gaussian kernel to
estimate the background, and then subtracts it from the image. The same operation is also applied to
the PSF to estimate the effective shape of a point-source in this background-subtracted
map.
Before applying the filter to our cosmology data, we first look at the effect it has on the map of Uranus
from Fig. 9. We create a simple parameter file called smooth.ini,
[SCUBA2_MATCHED_FILTER]
SMOOTH_FWHM = 15
where SMOOTH_FWHM = 15 indicates that the background should be estimated by first smoothing the
map and PSF with a 15 arcsec FWHM Gaussian. Next, the recipe is executed as follows:
% picard -recpars smooth.ini SCUBA2_MATCHED_FILTER uranus.sdf
The output of this operation is a smoothed image called uranus_mf.sdf. By default, the recipe
automatically normalizes the output such that the peak flux densities of point sources are conserved.
Note that the accuracy of this normalization depends on how closely the real PSF matches the
7.5 arcsec and 14 arcsec full-width at half-maximum (FWHM) Gaussian shapes assumed at
450 μm and
850 μm,
respectively (an explicit PSF can also be supplied using the PSF_MATCHFILTER recipe parameter).
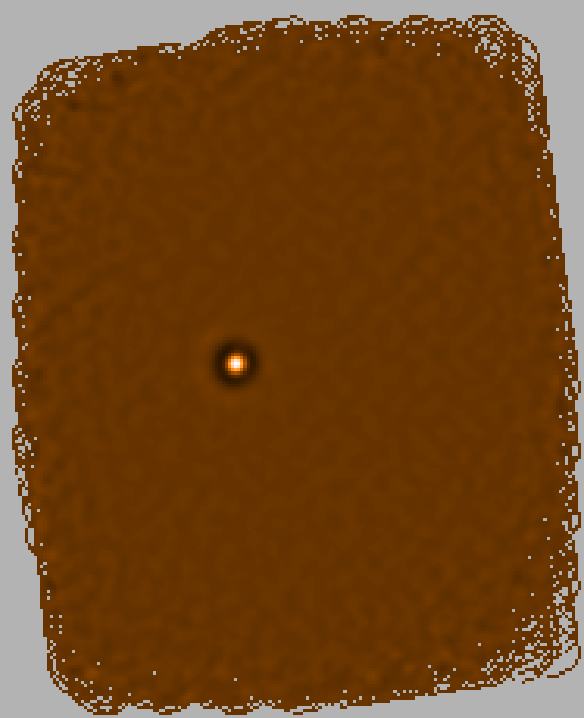
The smoothed Uranus map is shown in Fig. 12. The map is generally flatter than the raw output of
makemap, and the noise level is significantly reduced. However, the price that we pay for suppressing
signal on scales larger than 15 arcsec is visible as the large negative ring around the source. For this
particular case the dip is about 10 per cent of the peak signal. In addition to ringing, the filter
attenuates the peak flux density of point sources. However, the normalization applies a
positive correction to preserve peak flux densities, which results in an increased noise
level.
Now that we know what this procedure does to a bright point source, we proceed to filter the map of
MS0451:
% picard -recpars smooth.ini SCUBA2_MATCHED_FILTER map450.sdf
The smoothed map, map450_mf.sdf, is shown next to Uranus in Fig. 12. As hoped, this map has most
of the remaining large-scale residual structure removed, and in general the noise is significantly
reduced.
Finally, how should we find sources? The filtered map also contains a VARIANCE component, so it is
easy to produce a S/N map using the Kappa task makesnr:
% makesnr map450_mf map450_mf_snr
The resulting map, map450_mf_snr, is shown in Fig. 13. Compared to Fig. 12 the edges no longer
appear as noisy because they have been down-weighted by the larger noise values where there were
less data.
A basic procedure for identifying sources would be to locate peaks above some threshold S/N.
However, as a word of caution, even after all of these steps the noise may not be perfectly
well-behaved. In this example we do not expect any real astronomical source, so the S/N map
should have a brightness distribution that resembles a Gaussian with standard deviation
σ=1
and mean zero. We perform this comparison for the central
100×100 pixels
of the S/N map in Fig. 14, well away from any edge effects. In this case we find that the real
distribution is slightly narrower than expected, suggesting that the noise has been mildly
over-estimated.
We recognize that noise characterization is of utmost importance to the deep surveys, and
we will continue to develop methods for estimating the true noise distributions in the
final maps (e.g., using Monte Carlo simulations). Also, the Gaussian background noise
suppression currently implemented in the matched-filter is isotropic. Clearly some of the residual
large-scale noise has a preferred direction (such as the vertical stripes in Fig. 11). We are
therefore investigating ways of automatically estimating more efficient filters for specific map
geometries that will hopefully result in flatter maps, with reduced negative ringing around
sources.
As a parting word on this subject, we mention some other tests that PIs should consider
undertaking:
- Experiment with the size of the background suppression filter, as the large-scale noise
depends on the scan pattern and state of the instrument when the data were taken. In this
example, 15 arcsec was chosen in order to remove the bulk of the stripes parallel to the
edges of the map. A smaller filter will cause more ringing, and more attenuation of the
peak value (as mentioned above this is corrected for in terms of absolute calibration, but
the S/N is reduced). On the other hand, a larger filter will leave more of the large-scale
noise features.
- Split your data into mutually-exclusive subsets and produce independent maps. Are the
highest S/N peaks detected in each of them?
- Use jackknife tests to verify the estimated noise levels, i.e. produce two maps from independent
portions of the data and difference them (e.g., using the Kappa task sub). This will remove
any astronomical signal, but increase the noise by a factor of about √2.
Is the standard deviation in the central pixels (where the noise should hopefully be uniform)
roughly √2
larger than the noise estimated for either of the original maps?
- How many negative peaks above a given S/N are there compared to the positive peaks?
6.2 Extended Galactic Sources
In this section we shall focus on the reduction of extended, Galactic sources. In the following example
we produce a map of the Orion nebula from two observations (#22 & #23) taken on 16th February
2010. Two alternative methods will be used. The first is more cumbersome, but illustrates the use of
Picard facilities for background removal, cropping, and mosaicking. The second method uses an
alternative DIMM configuration aimed at maps of bright extended structures, and a single call to
makemap.
6.2.1 Standard DIMM configuration + Picard
If, as in this case, you have multiple observations contributing to your map, each observation can be
reduced separately, and then combined to make the final map. Currently there is no advantage in
terms of data quality to reducing all observations simultaneously or separately. However, the latter
does allow the option of assessing the individual maps before coadding and is the method followed in
this example.
When running the DIMM we select the default configuration file dimmconfig.lis; the individual
parameters of which are described in Section 4.
% makemap ’$STARLINK_DIR/share/smurf/s8d20100216_00022_000?.sdf’ Orion22 \
method=iterate config=^$STARLINK_DIR/share/smurf/dimmconfig.lis
% makemap ’$STARLINK_DIR/share/smurf/s8d20100216_00023_000?.sdf’ Orion23 \
method=iterate config=^$STARLINK_DIR/share/smurf/dimmconfig.lis
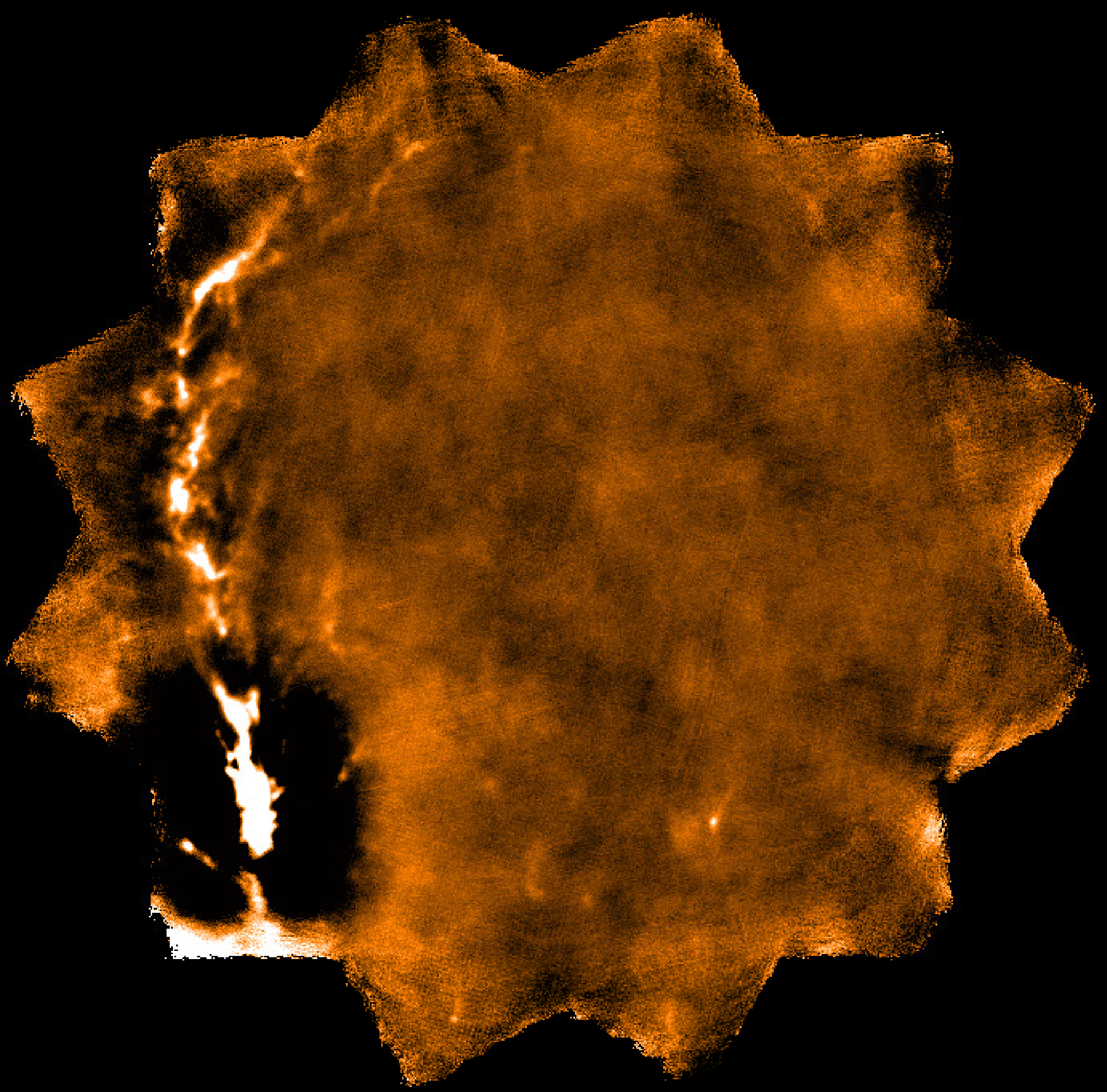
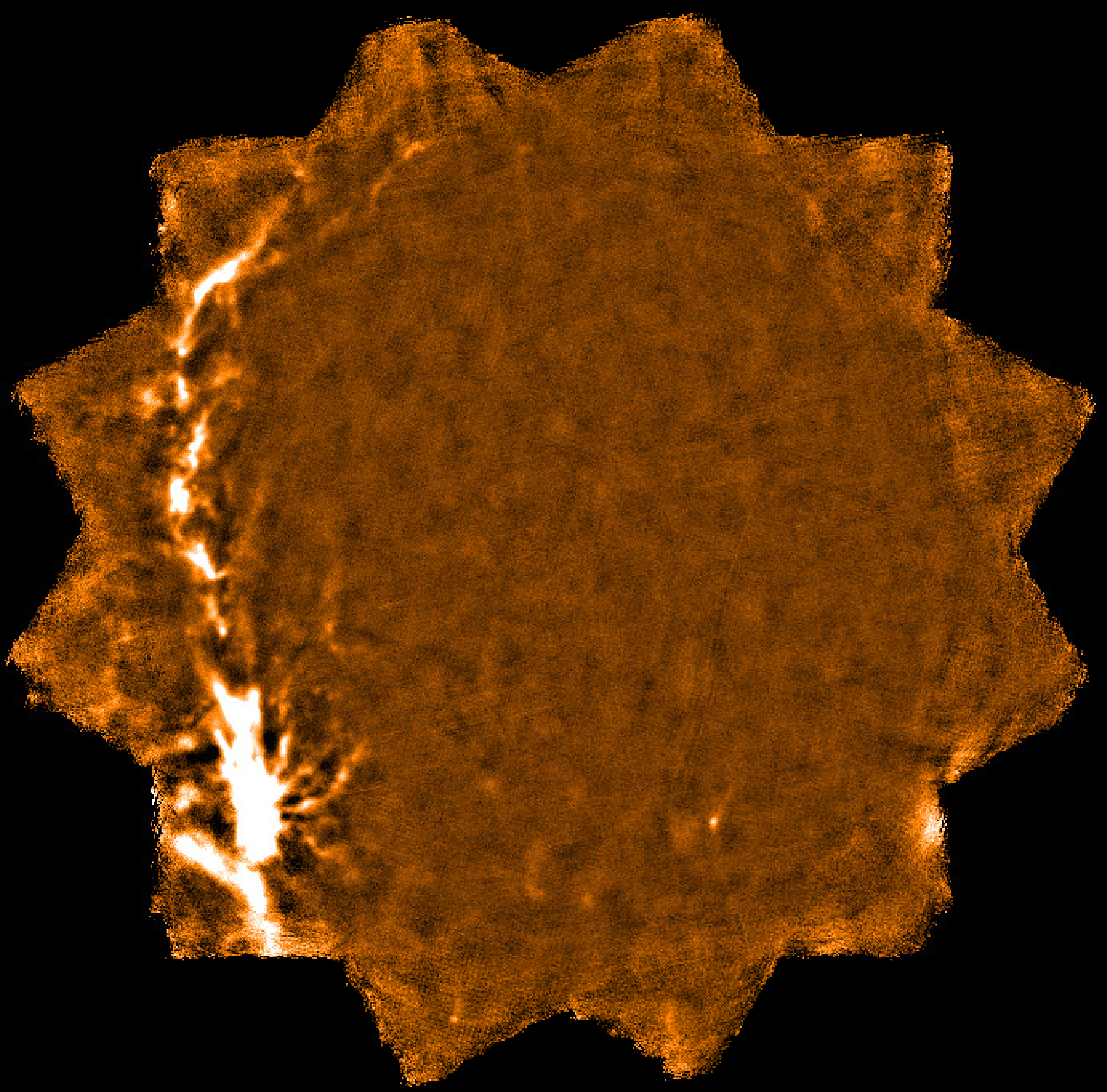
The map from each observation is shown on the top row of Fig. 15. Note that these maps were
observed as a series of rotating pong patterns to avoid repetition of any scan direction, hence their
distinctive shape.
The default configuration file is designed to preserve maximum flux, however the difficulty of
distinguishing between low frequency noise and real extended source emission inevitably means that
some low frequency noise ends up in the final map. The maps show that although extended emission
has been recovered the background is far from flat, displaying large scale patchiness as well as deep
negative bowling surrounding the strongest sources.
Both of these effects can be mitigated by post-processing using the Picard recipe REMOVE_BACKGROUND.
A number of different techniques are available in this recipe to control how the background is
removed. In this example we have selected Cupid findback which uses spatial filtering to remove
structure on a size scale less than that specififed by the parameter FINDBACK_BOX. The modified
parameter file (params.ini) is shown below where the method is set to findback and the
findback box size to 30 pixels or 120 arcsec when using 4 arcsec pixels:
[REMOVE_BACKGROUND]
BACKGROUND_FITMETHOD = findback
FINDBACK_BOX = 30
Caution is advised when selecting the box size, with a smaller box giving a flatter background but at
the expense of source flux. This is of particular importance to extended sources where the recovery of
faint emission is paramount.
% picard -recpars params.ini REMOVE_BACKGROUND Orion22.sdf
% picard -recpars params.ini REMOVE_BACKGROUND Orion23.sdf
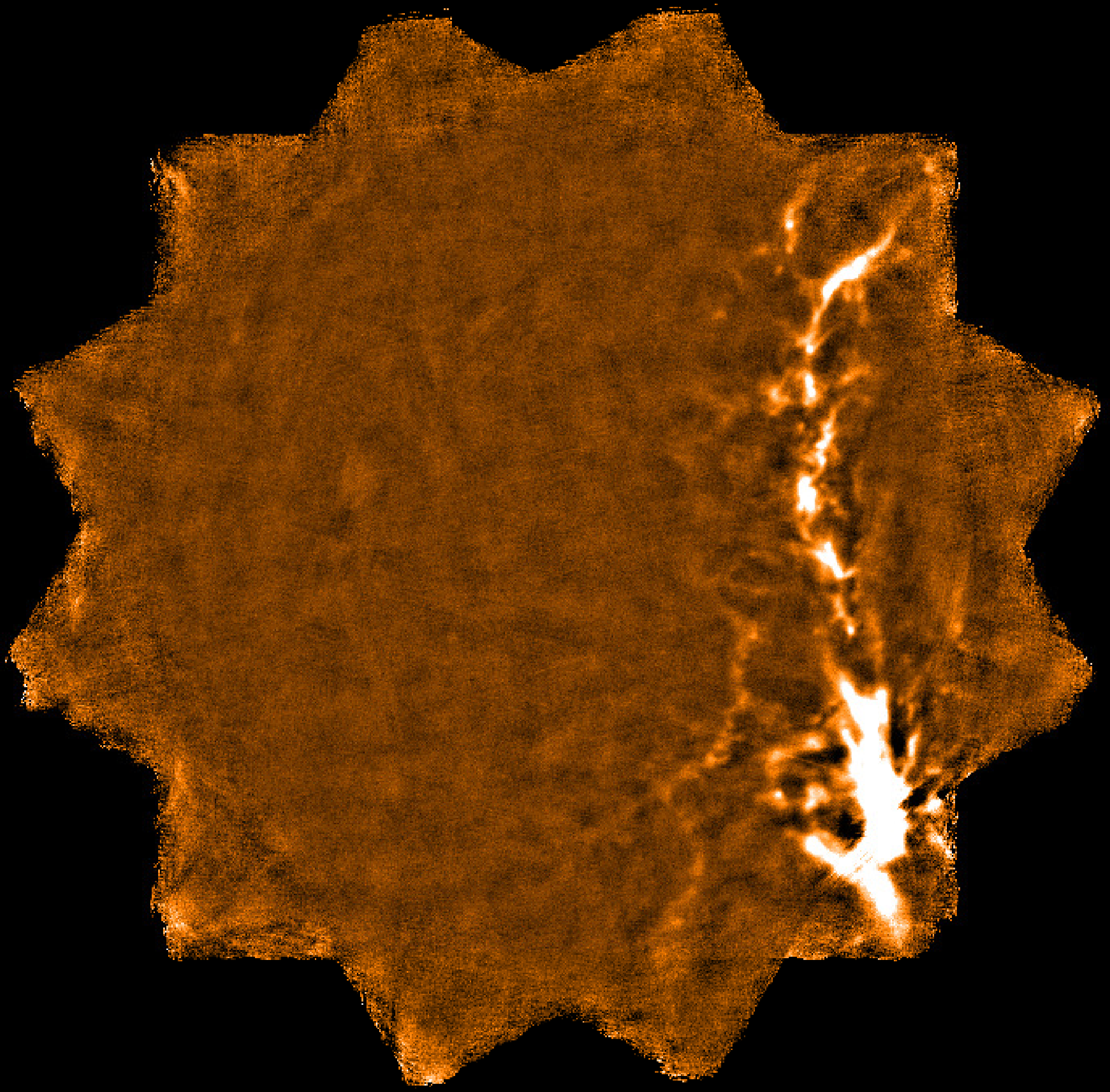
The background subtracted maps are shown on the bottom row of Fig. 15 where both the
bowling and uneven background have been significantly improved. Before we combine the
maps we will first crop them to their originally requested size using the Picard recipe
CROP_JCMT_IMAGES.
% picard CROP_JCMT_IMAGES Orion22_back.sdf
% picard CROP_JCMT_IMAGES Orion23_back.sdf
These cropped maps are then coadded using MOSAIC_JCMT_IMAGES. This example utilises the default
parameters where wcsmosaic with variance weighting is used for the mosaicking method although it
can be configured to use makemos or to use a different wcsmosaic method.
% picard MOSAIC_JCMT_IMAGES Orion2*_back_crop.sdf
The key advantage to using the Picard recipe over standalone Kappa commands is that the exposure
time image is also propagated correctly to the output mosaic (it is stored in the .MORE.SMURF.EXP_TIME
extension).
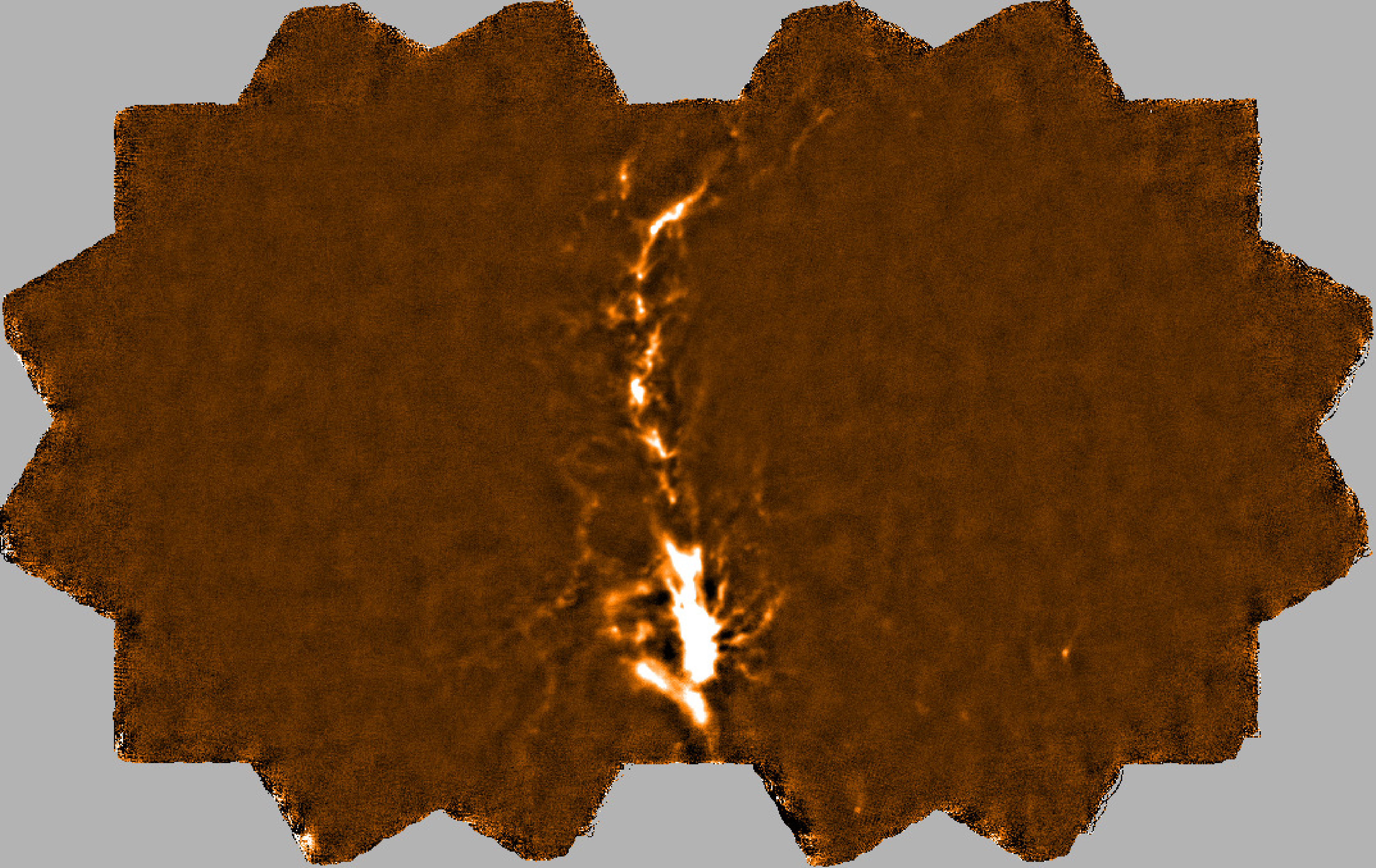
The final, coadded map is shown in Fig. 16.
Note the output filename convention for each Picard recipe: REMOVE_BACKGROUND creates
output files with the suffix _back, CROP_JCMT_IMAGES creates files with the suffix _crop,
while MOSAIC_JCMT_IMAGES creates files with the suffix _mos appended to the last input
filename.
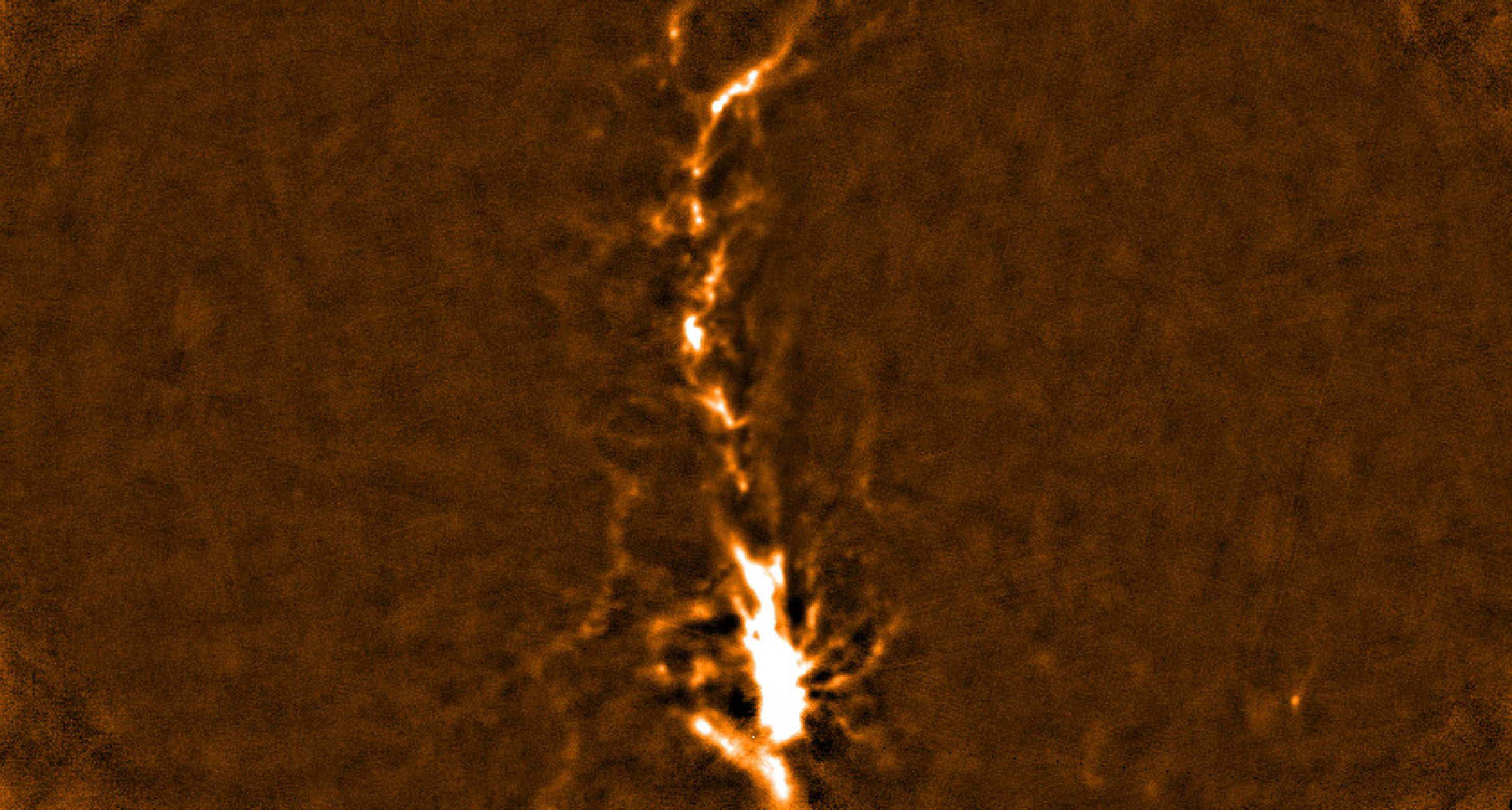
6.2.2 Bright / extended DIMM configuration
The simpler method is to make a map from all of the data at once using dimmconfig_bright_extended.lis:
% makemap "$STARLINK_DIR/share/smurf/s8d20100216_00022_0002[23].sdf" Orion \
method=iterate config=^$STARLINK_DIR/share/smurf/dimmconfig_bright_extended.lis
The large-scale noise and negative bowling is compensated for using a S/N-based
zero mask during map-making. Everywhere the signal is below this threshold
(5-σ by
default), the map is set to zero for all but the final iteration. The resulting map, and the location of the
iteratively-determined zero mask are shown in Fig. 17.
Copyright © 2009-2010 University of British Columbia
Copyright © 2009-2010 Science & Technology Facilities Council